
When you buy, e.g., a 100-horsepower motor, you may expect that you can utilize all 100 ‘horses’ powering that machine. But there are six situations where operating your motor at 100% of its nominal capacity will expedite its failure:
- Hot ambient temperature
- High elevation
- Heated mounting
- Power quality problems
- Low-speed operations
- High-speed VFD switching frequency
In these instances, derating your motor will preserve its life-improving reliability and ensuring you get the most return out of your capital investment.
This week, we’ll tackle the first situation, and in the coming weeks, we’ll tackle the remaining five.
1. It’s getting hot in here
I can’t say it enough — heat is one of the most damaging stresses that your motor experiences. Motor insulation degrades at an accelerated rate when the motor’s operating temperature exceeds its insulation class’s maximum rating.
Most induction motors rely on ambient air to dissipate any efficiency losses converted to heat. When the ambient environment gets too hot — above 40°C (105°F) per NEMA MG1 — the heat transfer model breaks down: the motor can no longer transfer enough heat to the environment to self-cool effectively. As a result, the motor’s operating temperature climbs, and may exceed the maximum temperature for its insulation class (shown in the table, below). On top of that, every 10°C (18°F) rise above the insulation class’s limit cuts your motor’s expected life in half. To preserve your motor’s life, derate the motor — reducing its load — so that its operating temperature stays within its insulation class’s limits. Derating your motor depends on the ambient temperature as well as the motor’s insulation class and its temperature rise at nominal, or rated, load.
To preserve your motor’s life, derate the motor — reducing its load — so that its operating temperature stays within its insulation class’s limits. Derating your motor depends on the ambient temperature as well as the motor’s insulation class and its temperature rise at nominal, or rated, load.
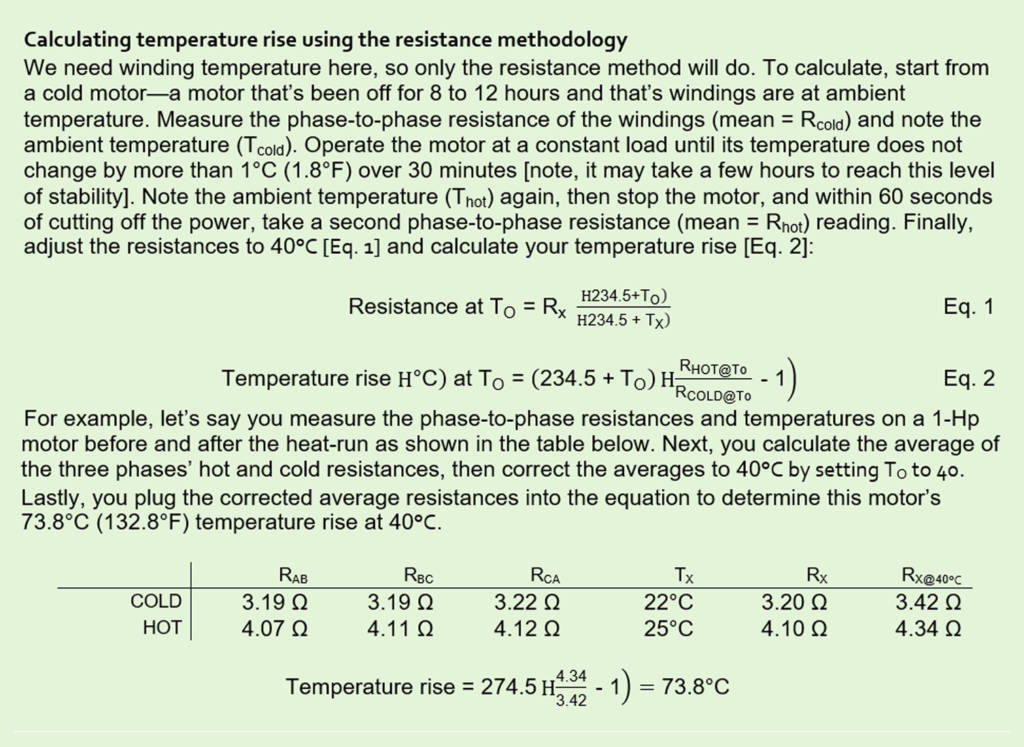
Some motors list the expected temperature rise on the nameplate — either providing a number (e.g., 60°C) or an insulation class designation (e.g., B, meaning the motor meets the allowed temperature rise for Insulation Class B, 90°C; see table above). If not listed, then you can either determine the temperature rise using the resistance method [see inset, below], or assume a motor’s temperature rise equals the maximum temperature for the motor’s insulation class minus the motor’s rated maximum ambient temperature (generally 40°C). For example, for a motor with Insulation Class F with a 40°C maximum ambient temperature, assume a temperature rise of 115°C.
 If your motor’s temperature rise plus the ambient temperature remains below the insulation class’s maximum, you’re golden. If it exceeds this limit, you’ll need to back off the load if you wish to preserve the motor’s life.
If your motor’s temperature rise plus the ambient temperature remains below the insulation class’s maximum, you’re golden. If it exceeds this limit, you’ll need to back off the load if you wish to preserve the motor’s life.
The majority of a motor’s heat-generating losses are proportionate to the square of its current (core, stator/rotor resistance, and stray-load losses). Therefore, to determine your derating factor, simply take the square of the desired temperature rise — the amount that will keep you under the insulation class’s maximum — divided by the motor’s temperature rise at full load at its expected ambient temperature:

Since the hot resistance to cold resistance remains the same at a constant ambient, you can rearrange Eq. 2 to determine the expected temperature rise at an elevated ambient temperature where you know the expected temperature rise at a known temperature, TK, such as 40°C:

If you’ve done a heat-run test to determine your motor’s cold and hot winding resistances, you can be even more exact. For example, let’s say the 1-horsepower motor from the inset example above has insulation class F, temperature rise class B, and operates in a lightly-heated kiln that’s kept at 75°C (167°F). Because you know the motor’s hot and cold resistances, you use Eq. 1 to calculate this motor’s expected temperature rise at full-load when operating in a 75°C kiln as 82.6°C (148.6°F). Thus, the motor’s expected operating temperature of (75°C + 82.6°C) exceeds the insulation class’s maximum temperature of 155°C by 2.6°C. You decided to add in a hot-spot allowance of 10°C while derating this motor to ensure it doesn’t exceed the Class F maximum; i.e., you want to drop its temperature rise at 75°C to 70°C (82.6°C – (157.6°C – 155°C) – 10°C). Therefore, you derate the motor by (1 Hp × (70°C ÷ 82.6°C)2), to 0.72 Hp.
Ideally, you’ll apply these equations in reverse to size a motor for an application in a hot environment. For example, let’s say that we need 4.5 brake-horsepower for a particular application in a 50°C ambient. You don’t have temperature rise information, but you plan to specify a motor with Class F insulation. You assume a temperature rise of 115°C at full-load in a 40°C environment, then apply Eq. 3 to adjust its expected full-load temperature rise to a 50°C ambient (119.2°C), resulting in an expected operating temperature of 169.2°C at full-load in this environment. You decide to give yourself a hot-spot allowance of 10°C, reducing the desired temperature rise to (119.2°C – (169.2°C – 155°C) – 10°C) to 95°C. To determine what size motor we need to supply 4.5 BHp at 50°C, we’ll divide the application requirement by the derating factor:
 Applying Eq. 5, we’ll need a motor rated for at least 7.05 Hp to safely provide 4.5 brake-horsepower at 50°C; therefore, you should specify a 7.5 Hp, insulation-class-F motor for this application.
Applying Eq. 5, we’ll need a motor rated for at least 7.05 Hp to safely provide 4.5 brake-horsepower at 50°C; therefore, you should specify a 7.5 Hp, insulation-class-F motor for this application.
But what happens if your kiln is located at the top of a mountain? To find out, email Nicole at info@motorsatwork.com, or tune in next week.